
adventurebot
prompt:
design a robot to accomplish a simple task.
ME 2011: Intro to Engineering

Ideation






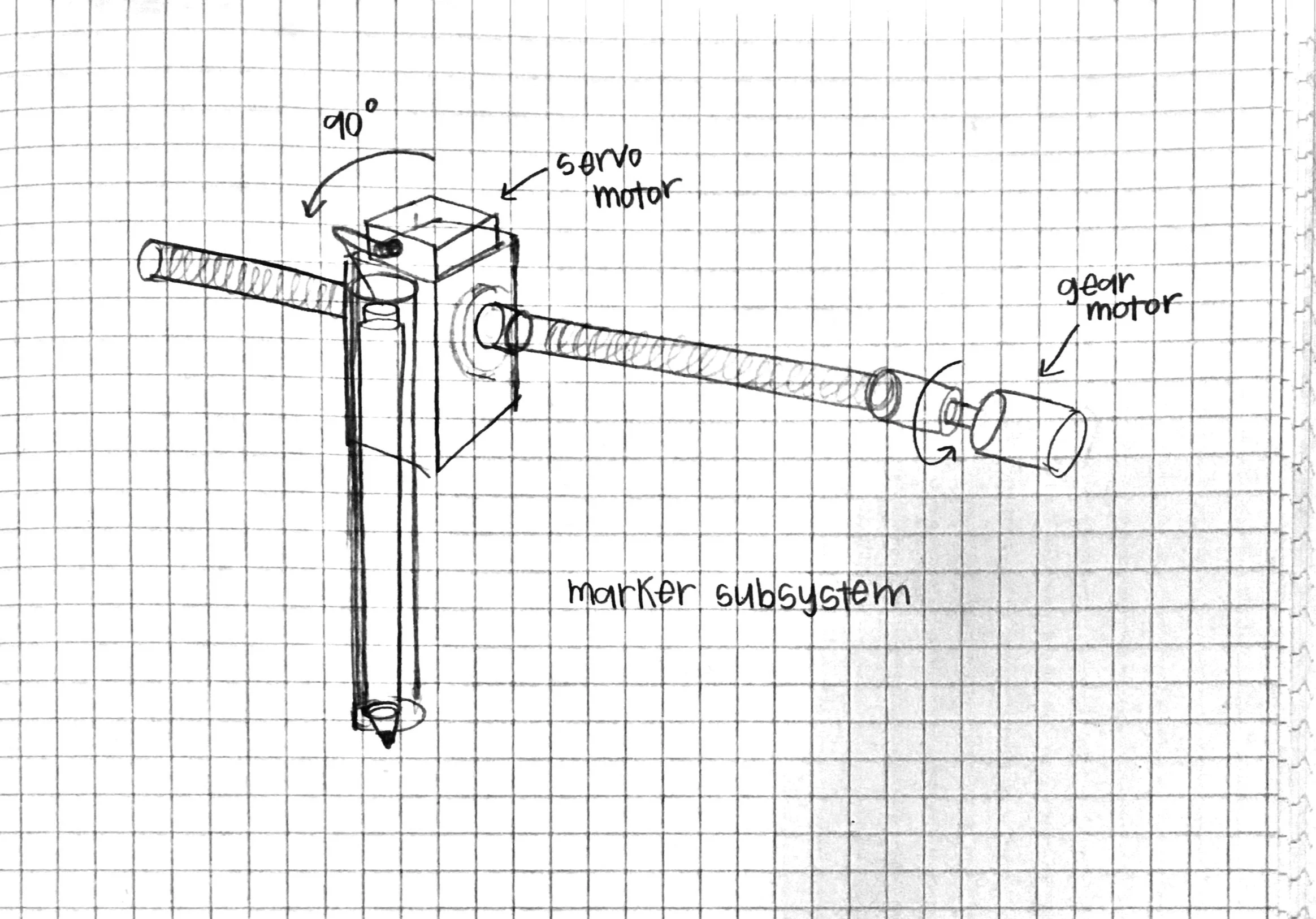
Subsystem Sketches



Final Design
The AdventureBot is a robot designed to inspire adventure by marking a randomized location on a map. It features three types of linear motion mechanisms: a cable drive, slider crank, and a lead screw. When powered, a watchdog LED blinks until a button is pressed to begin the cycle. In order to place a point, an X location is first generated and a stepper motor moves the base plate to that position using the cable drive. Next, a random time is generated to rotate the DC motor and lead screw, moving the pen to its Y position. To mark the location, the pen is lowered using a servo motor slider crank mechanism. Finally, the robot resets to its original position.
